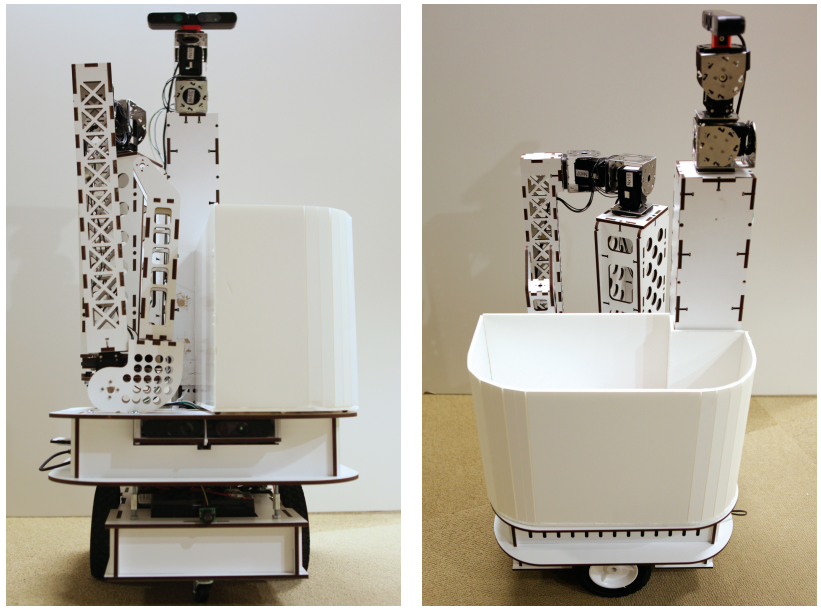
In 2012, I became the Robot Development Manager at Willow Garage. During that time I worked on several internal projects focused on building the next generation of robot hardware at Willow Garage. PlatformBot was meant to be an exploration of technologies and capabilities for meeting the long term goals of creating a robot that would have a BOM cost of $6000 at a quantity of 10,000. It was designed to meet the requirements of several user-stories derived from the 2011 year-long task explorations and lessons learned from PR2 and Heaphy project. The PlatformBot project was kicked off on January 20, 2012 and the first robot. Huey, was delivered to Willow Garage on June 8, 2012. Over the course of 140 calender days, 101 business days, the team formulated users stories, defined a specification, designed and fabricated mechanical and electrical components, and assembled the robot. Shortly following the arrival of the first robot, the second and third robots (Dewey and Louie) arrived on June 22, 2012. Approximately one month later on July 25, 2012, Louie drove autonomously around Willow Garage a distance of 5.7km.
Before starting the process of designing PlatformBot the team took time to develop user stories. These stories captured what the robot must do or needs in order to perform a specific task or function. The user stories uncovered hardware and software needs and helped generate a concise set of capabilities for the PlatformBot.
As a robot owner, I want my robot to give tours of my building (i.e. a house or business) and give information about the purpose and/or content of rooms. Users should not feel as if the robot is getting in their way
As a robot user, I want to move a basket of laundry from point A to B. (This user story concentrates on the physical process of moving laundry to and from the washing machine or laundry room in the home. This user story could also be extended to explore moving, organizing, or storing other common household objects around the house to assist the homeowner with chores and other daily tasks.)
As a robot owner, I would like to be able to move the robot without assistance. This should be possible without a network connection and in some cases with the robot turned off.
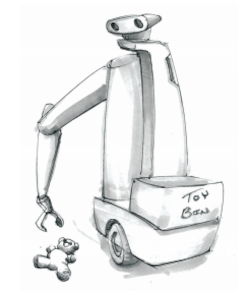
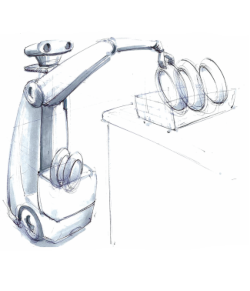

As a homeowner, I would like the robot to pick objects off the floor and gather them in bins.
After a long day at work, I want the robot to bring me my favorite beverage.
As a building manager, I want a robot to pick up dishes left around the building.
As a plant owner, I want my robot to tend to my plants so that they do not die.
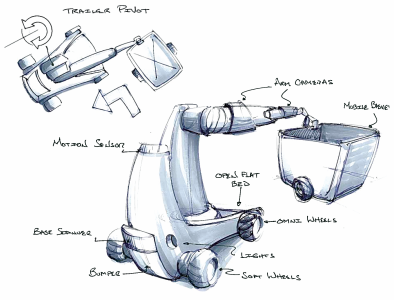
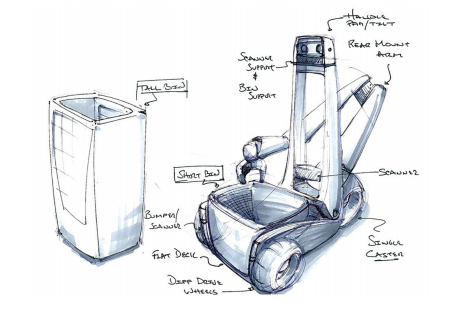
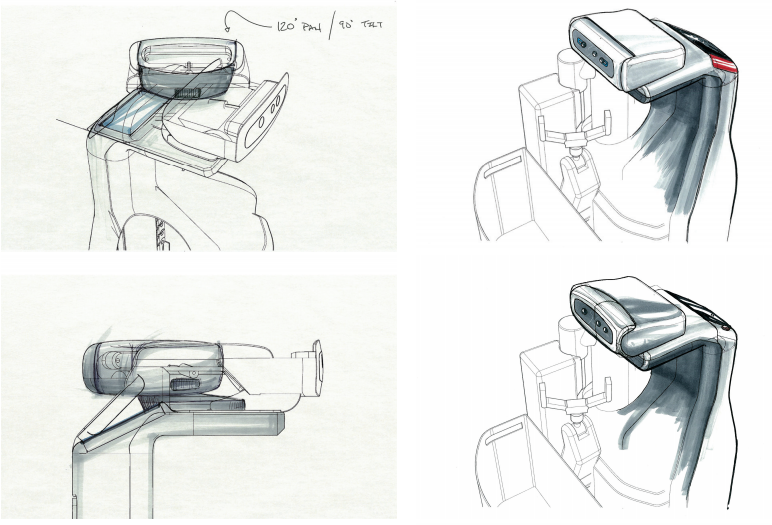
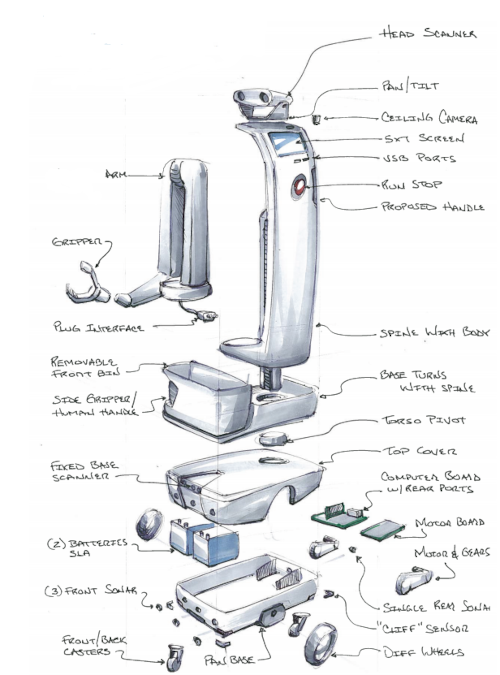
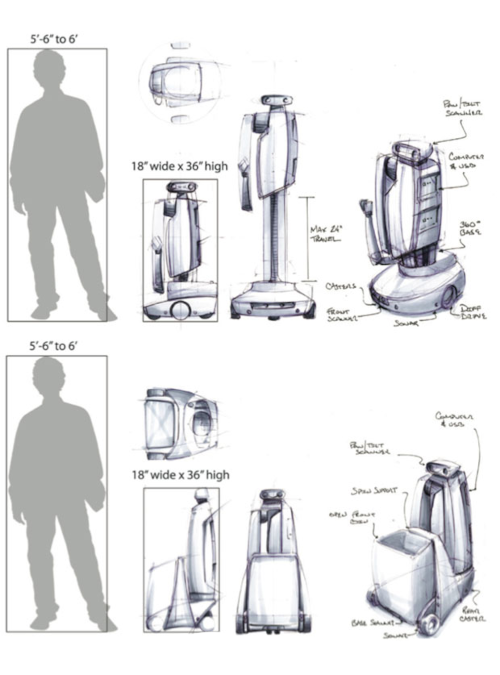
As the specification developed, exploded view sketches illustrated the type of components and their configuration that would be needed to have a functional prototype. This concept also helped convey the basic mechanical layout and assembly of components considered. While developing new concepts, sketching needed to convey real human scale with the dimensions proposed for PlatformBot. The orthographic comparisons next to the average human size provided a realistic understanding of the robot’s scale as well as limitations.
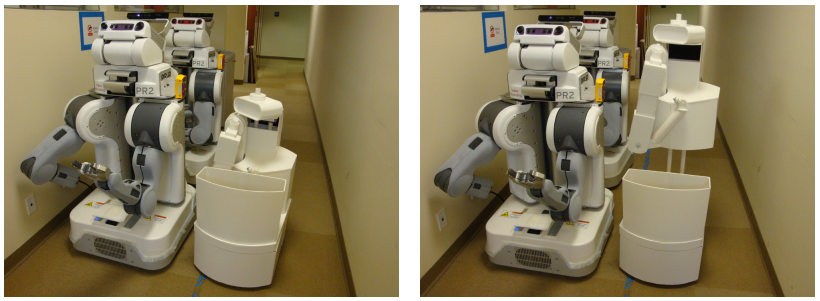
Along with providing an understanding of form, function and kinematics, form core mock-ups were used to illustrate and act out various scenarios for story boarding and story telling. Pictured below is a size comparison between the PlatformBot and the PR2.
In December of 2008, the PR2 drove 2π km over two days, driving π km each day without incident. This major milestone, known as Milestone 1, demonstrated the initial capabilities of the PR2 hardware and software and was the foundation of future work. Once again Willow Garage was building hardware and needed a to demonstrate the hardware and software capabilities of the robot, Milestone 1 was an obvious choice. In June of 2012, the team began work on Milestone 1 for PlatformBot, developing the low level ROS interfaces to enable Milestone 1; including basic bring up scripts, odometry, controllers, diagnostic, and firmware. At the beginning of July 2012, the team started integration with the ROS navigation stack and performing test runs around Willow Garage. On July 26 Louie drive a total of 5.7km in one day before running out of battery. The following week Louie completed Milestone 1, driving a total of 7.1km. However both these runs required stopping the milestone run to charge and the team had set a goal of running the entire milestone on a single battery charge. On August 7, 2012, Louie drove 6.27km on a single battery charge coming only 150m short of the milestone goal of 6.28km.

Articles about PlatformBot: