
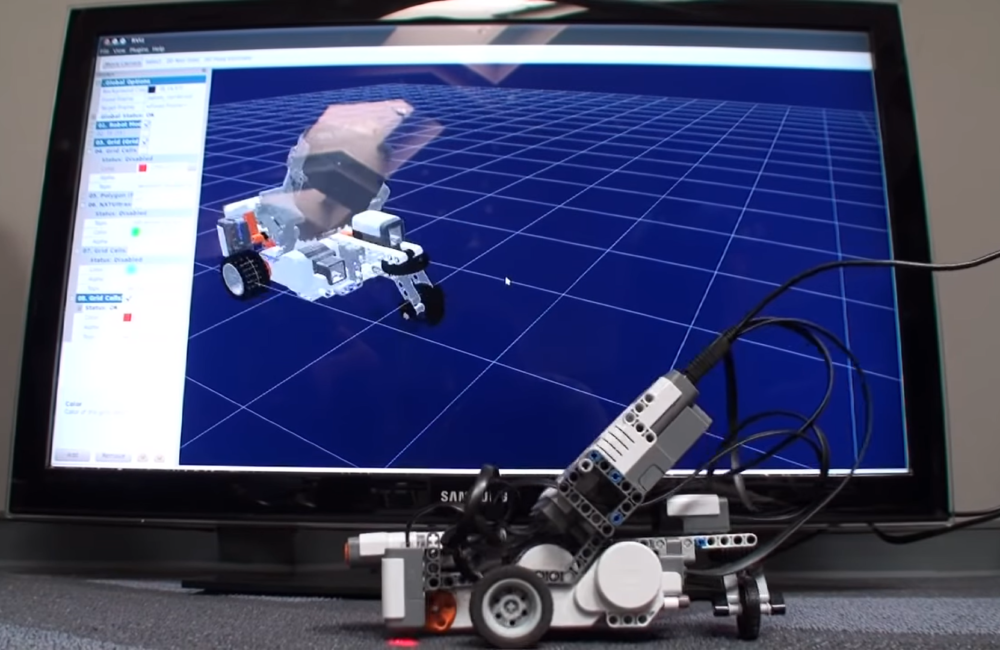
In August 2010, I did a bit of a hack-a-thon with Tully Foote and Wim Meeussen to create ROS NXT which provides a ROS interface and visualization tools for the NXT mindstorm modules. NXT users can take robot models created with Lego Digital Designer, and automatically convert them into robot models compatible with ROS. The converted robot model can be visualized in rviz. The bridge between NXT and ROS creates a ROS topic for each motor and sensor of the NXT robot.
Once a robot is connected to ROS, a user can start running applications such as the base controller, wheel odometry, keyboard/joystick teleoperation, and even assisted teleoperation using the ROS navigation stack. The NXT-ROS software stack includes a number of example robot models for users to play with and to get a feel for using NXT with ROS.
Please see the nxt page on the ROS wiki for documentation, demos, and more. The developers would like to thank the nxt-python project for support and development.